Uzm.Dr.Bahri Gök, Robotik Üroloji Eğitimi, 2016-2018
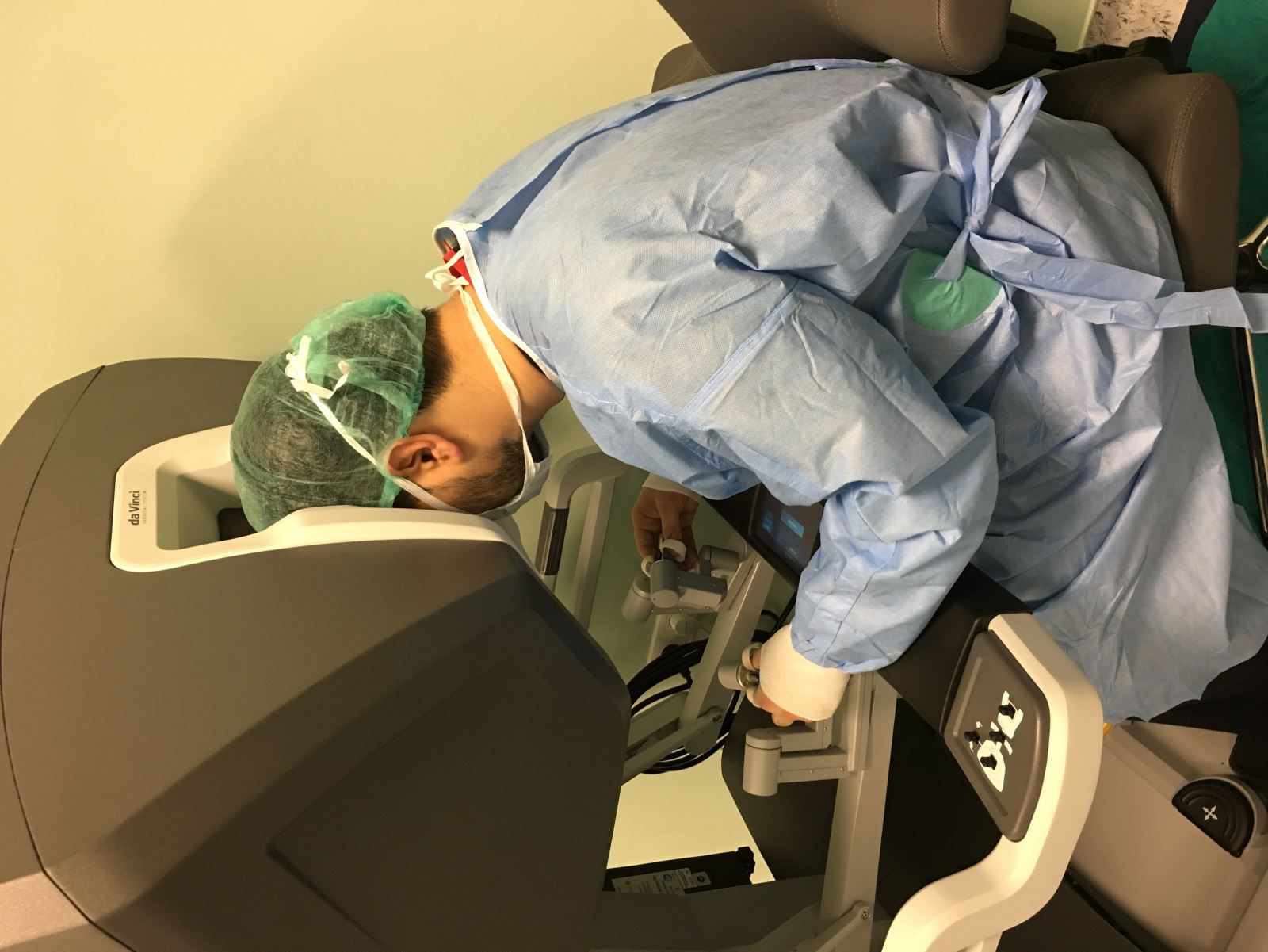
Da Vinci robotik cerrahi sistemi ile ameliyatlara ilk olarak kliniğimizde 2009 yılında başlanmıştır. Robotik cerrahi sistemle kliniğimizde daha çok mesane, prostat ve böbrek cerrahisi yapılmaktadır. Robotik cerrahide bir konsol cerrahı, bir hasta başı asistanı ve birde hasta başı cerrahi hemşiresi yer almaktadır. Hasta başı asistansı gerek diğer cerrahiler gerekse robotik konsol cerrahisinde olduğu gibi belli sayı da vaka deneyimi gerektirmektedir. Bu deneyimin ilk etabı olarak hasta başında asistanslık belli sayı da vakayı izlemekle başlar. Ben ilk 20 vakayı deneyimli bir asistandan gözlemledikden sonra hasta başı asistansa başladım. Asistanlık yaptığım vaka sayısı yaklaşık olarak 100 civarındadır. Hasta başı asistanının görevi hasta uyuyup hasta boyanıp örtüldükden sonra başlamaktadır. Asistanın görevlerinden bir tanesi cerrahi prosedüre göre değişen sayıda portları hastanın karnına yerleştirmektir. İlk olarak karına kamera portunu yerleştiriyoruz. Genelde 1 cm’lik bir insizyon yapılıp cilt asıldıktan sonra veress iğnesi ile batını 15 mmhg ya kadar şişiriyorum. Hastanın geçirilmiş batın cerrahisi varsa açık giriş ile kamera portunu yerleştirmeyi tercih ediyorum. Kamera portunu girdikden sonra kamera ile giriş yaptığım yerdeki barsaklara veya organlara zarar verip vermediğimi kontrol ediyorum. Batın içerisinde konsol cerrahının çalışmasını engelleyecek yapışıklık varsa uyarıda bulunuyorum. Daha sonra sırasıyla diğer trokarların batına yerleştirileceği yerleri belirleyip kamera ile batın içerisinden yerlerinin uygunluğunu kontrol ettikden sonra diğer robot kollarının gireceği trokarları ve asistans portunu yerlştiriyorum. Port giriş yerlerinde kanama olup olmadığını kontrol ediyorum. Robot yanaştırıldıktan sonra robot kollarını batına yerleştirdiğim trokarlara bağlıyorum ve robotik aletleri trokarların içerisinden batına girecek şekilde kollara takıyorum. Monopolar ve bipolar koterleri aletlere yerleştiriyorum. Gaz hotumunuda asistan portuna takdıkdan sonra konsol cerrahına hastanın hazır olduğu bilgisini veriyorum. Tüm cerrahi aletleri asistan portundan batın içerisine verip alıyorum. Ameliyat esnasında kanama alanlarını ve oluşan dumanı aspire ederek cerraha yardımcı oluyorum. Konsol cerrahının uygun gördüğü damar yapılarına klip koyuyorum. Cerraha daha uygun görüş alanı sağlamak için dokuların ekartasyonuna yardımcı oluyorum. Sütür malzemelerinin asistan portundan carrahi alana verip alınması işlemini gerçekleştiriyorum. Bu işlem esnasında malzemelerin dışarıda olduğu bilgisini carraha iletiyorum. Ameliyat bitiminde spesmen torbasını asistan portundan cerrahi alana veriyorum ve cerrahın spesmeni torbaya koymasına yardımcı oluyorum. Ameliyat bitiminde kanama kontrolü sağlandıktan sonra portları batından çıkarıp spesmen torbasının ipini kamera portunun olduğu yerden dışarı alıyorum. Kamera portunun olduğu yerdeki insizyonu genişleterek spesmeni dışarı alıyorum. Spesmenin çıkarıldığı yerdeki cilt altı fasyaları PDS ile yaklaştırıyorum. Daha sonra kamera ve diğer port yerlerindeki cilt altı ve cilt yerlerini sütüre ediyorum. Pansumanla insizyon yerlerini kapatarak carrahi işlemi tamamlıyorum.